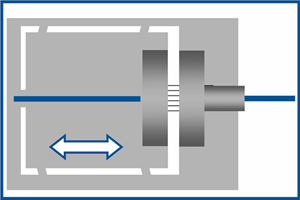
采用压电陶瓷驱动的一维压电纳米定位平台
压电平移台基于压电陶瓷复合放大式结构,内部采用高精度的无摩擦柔性铰链导向与实现大行程的杠杆放大结构设计相结合,采用有限元仿真分析优化柔性铰链结构,复合式的柔性导向系统具有超高的导向精度、有效消除侧向运动分量,具有高刚性、大推力、大承载、高动态、无摩擦、无磨损、免维护、小体积等特点,结构紧凑、易于集成,可组合成二维XY向台和三维XYZ向台。
内置电容式精密位移传感器,实现亚纳米分辨率
压电纳米定位台内置电容式精密位移传感器进行全闭环的位置反馈,电容式传感器以亚纳米分辨率进行测量,且无接触。它们可确保优异的运动线性、长期稳定性和千赫兹范围的带宽,确保纳米定位台具有极佳的运动控制精度,定位精度、分辨率和稳定性可以达到纳米量级,定位稳定时间仅为毫秒量级。
无摩擦零间隙的柔性铰链导向系统带来高精度的运动导向
压电纳米位移台内部使用无摩擦及空回的柔性铰链导向结构,采用有限元仿真分析优化柔性铰链结构,柔性导向系统具有超高的导向精度,柔性铰链导向具有高刚性、高负载、无摩擦、无磨损、无需润滑、免维护等特点。它们的刚性可实现高负载能力,且它们对冲击和振动不敏感。真空兼容,可在很广的温度范围内工作。
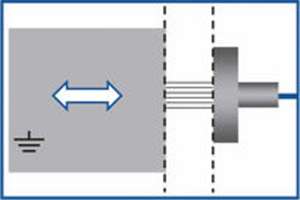
集成电容式位置传感器的压电陶瓷纳米定位系统可实现卓越的运动性、长期的高稳定性
将电容式精密位移传感器合理地安装在纳米级精密定位系统中,电容传感器可直接测量运动部件相对于基体的实际位置(直接计量)。传动系统、执行机构,杠杆臂,或导向系统的误差均不影响测量,从而发生在传动系统中的任何漂移或滞后会自动消除,由于外部误差可通过传感器及时检测并反馈,因此集成电容式位置传感器的压电陶瓷纳米定位系统可实现卓越的运动性、长期的高稳定性和刚性、快速响应的位置伺服回路。电容位置传感器可集成在纳米定位系统中或附着于外部。

采用无磁材质设计制造,不受磁场的影响
压电纳米位移台为无磁材质,使用过程中不产生磁场同时也不受磁场的影响。
内置高性能压电陶瓷促动器带来超长使用寿命
压电陶瓷促动器由环氧脂质涂层包裹,具有优异的防潮特性,避免漏电流增大造成故障。压电陶瓷促动器比传统式压电促动器的使用寿命更长,性能更稳定,可实现无故障运行1000亿个循环。
直接位置测量带来超高的运动控制精度
位移变化可直接在纳米运动平台上测量,完全不受驱动或导向元件的影响。这样可以实现最佳的重复定位精度、优异的稳定性和刚性、快速响应控制。
可提供适用于复杂真空应用版本
压电陶瓷纳米定位系统中使用的所有部件均非常适合于在真空环境中使用。操作无需润滑剂或润滑脂。压电陶瓷纳米定位系统可实现极低的排气率。
纳米级电容位移传感器可达到的精度分辨率是纳米级范围
研生PIEZOXYZ研发生产的纳米级电容位移传感器通过测量使用均匀电场的传感器探头和移动目标表面之间的电容的变化,绝对值通过经调整、校准的系统确定,最小距离偏差通过无接触在长距离基础上测量,可达到的精度分辨率是纳米级范围,可有效测量最短的距离,高分辨率位移测量中的纳米定位应用。通过双极板电容传感器测量移动物体最大精度的直接距离和实际位置。无接触测量高分辨力传感器具有较高的传感器带宽,可满足动态应用中的闭环控制。

|
◆ 可提供更小外形尺寸版本; ◆ 可提供XY轴版本; ◆ 可提供带通光孔版本; ◆ 无摩擦柔性铰链导向可实现极高的运动精度; ◆ 高性能压电陶瓷促动器带来超长使用寿命; ◆ 内置电容式精密位移传感器进行全闭环位置反馈,开/闭环可供选择。 |
● 干涉测量 ● 显微镜 ● 纳米定位 ● 生物技术 ● 测试应用 ● 半导体技术 ● 光子 ● 光纤定位 |


|
型号 |
P180C |
P181C |
P182C |
P184C |
P188C |
P189C |
单位 |
公差 |
|
主动轴 |
X |
X |
X |
X |
X |
X |
- |
- |
|
运动和定位 |
|
|
|
|
|
|
|
|
|
传感器类型 |
电容式 |
电容式 |
电容式 |
电容式 |
电容式 |
电容式 |
- |
- |
|
开环行程[-20V~+150V] |
60 |
120 |
250 |
500 |
1000 |
1800 |
μm |
±20% |
|
闭环行程[0V~+120V] |
50 |
100 |
200 |
400 |
800 |
1500 |
μm |
±20% |
|
开环分辨率 |
0.3 |
0.6 |
1.3 |
2.5 |
5 |
9 |
nm |
typ. |
|
闭环分辨率[16bit DAC] |
0.8 |
1.6 |
3.1 |
6.2 |
13 |
23 |
nm |
typ. |
|
闭环线性度 |
0.05 |
0.03 |
0.03 |
0.03 |
0.03 |
0.03 |
%F.S. |
typ. |
|
重复定位精度 |
±2 |
±2 |
±2 |
±5 |
±10 |
±15 |
nm |
typ. |
|
机械特性 |
|
|
|
|
|
|
|
|
|
运动方向刚度 |
0.4 |
0.35 |
0.2 |
0.1 |
0.1 |
0.1 |
N/μm |
±20% |
|
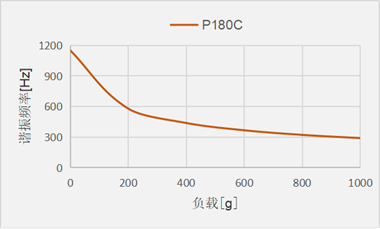
空载谐振频率 |
1150 |
800 |
400 |
210 |
120 |
120 |
Hz |
±20% |
|
运动方向推/拉力 |
10/10 |
10/10 |
10/10 |
10/10 |
10/10 |
10/10 |
N |
Max. |
|
承载能力 |
10 |
10 |
10 |
10 |
10 |
10 |
N |
Max. |
|
其他 |
|
|
|
|
|
|
|
|
|
工作温度 |
-20~80 |
-20~80 |
-20~80 |
-20~80 |
-20~80 |
-20~80 |
℃ |
- |
|
材质 |
铝,钢 |
铝,钢 |
铝,钢 |
铝,钢 |
铝,钢 |
铝,钢 |
- |
- |
|
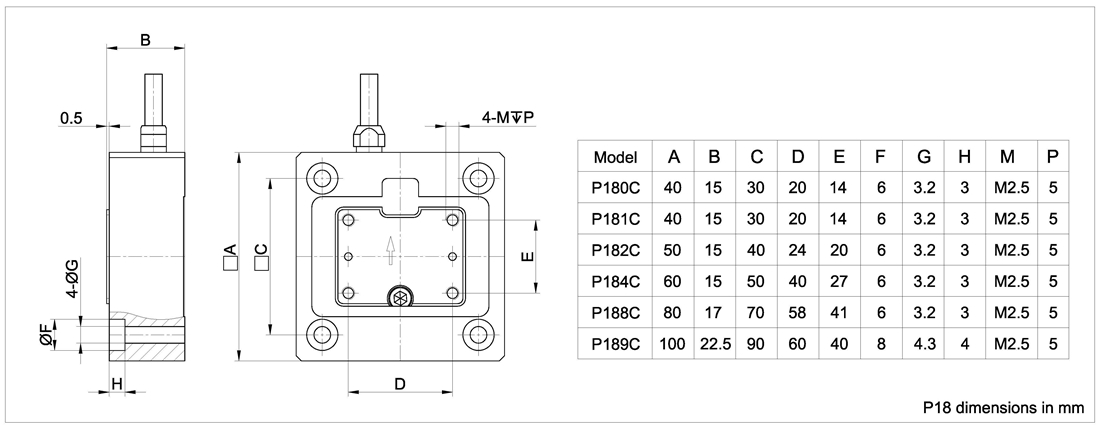
外形尺寸 |
40x40x15 |
40x40x15 |
50x50x15 |
60x60x15 |
80x80x17 |
100x100x22.5 |
mm |
- |
|
重量 |
0.15 |
0.15 |
0.2 |
0.25 |
0.4 |
0.8 |
Kg |
±5% |
|
线缆长度 |
1.5 |
1.5 |
1.5 |
1.5 |
1.5 |
1.5 |
m |
±10mm |
|
连接器类型 |
LEMO│SMB |
LEMO│SMB |
LEMO│SMB |
LEMO│SMB |
LEMO│SMB |
LEMO│SMB |
- |
- |
|
注:最大驱动电压为-20V...+150V;对于高可靠的长期使用,建议驱动电压为0V...+120V。 |
||||||||
❶ 基于无摩擦高精度柔性铰链运动导向的压电陶瓷纳米定位系统,系统分辨率仅受放大器噪声和测量技术的限制。开环分辨率为受系统放大器噪声限制所能达到的典型值。极低的系统定位噪声可获得满行程十万分之一以上的闭环分辨率。