
























-
-
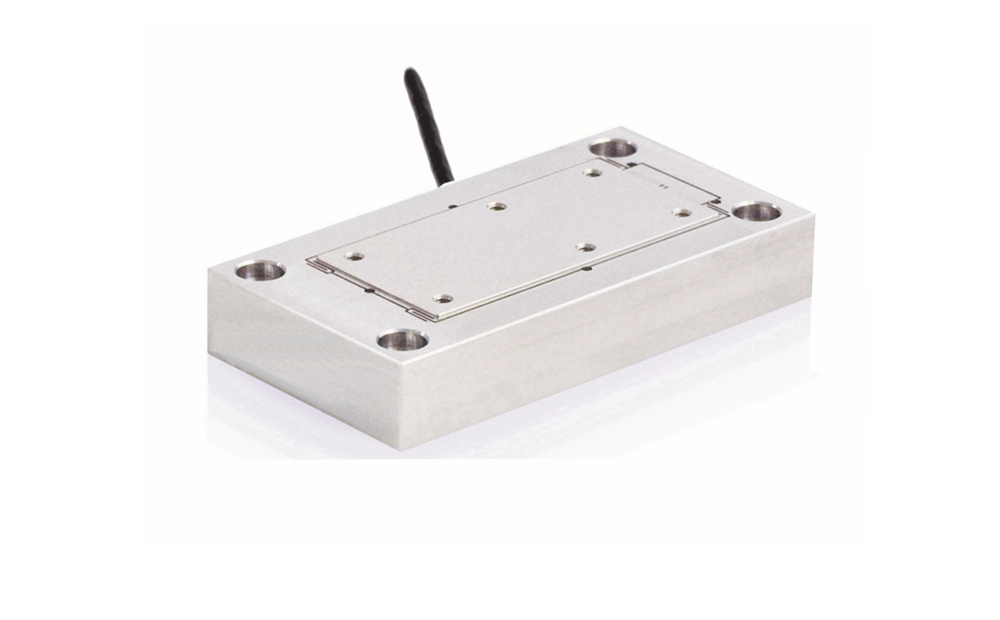
一维压电平移台【X】

-
一维压电升降台【Z】

-
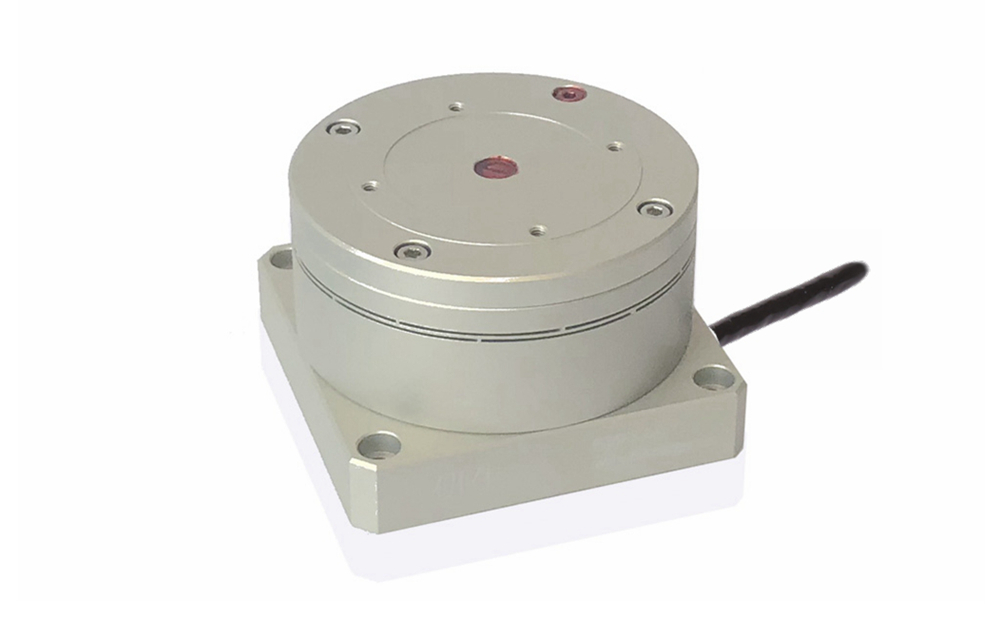
一维压电旋转台【θz】

-
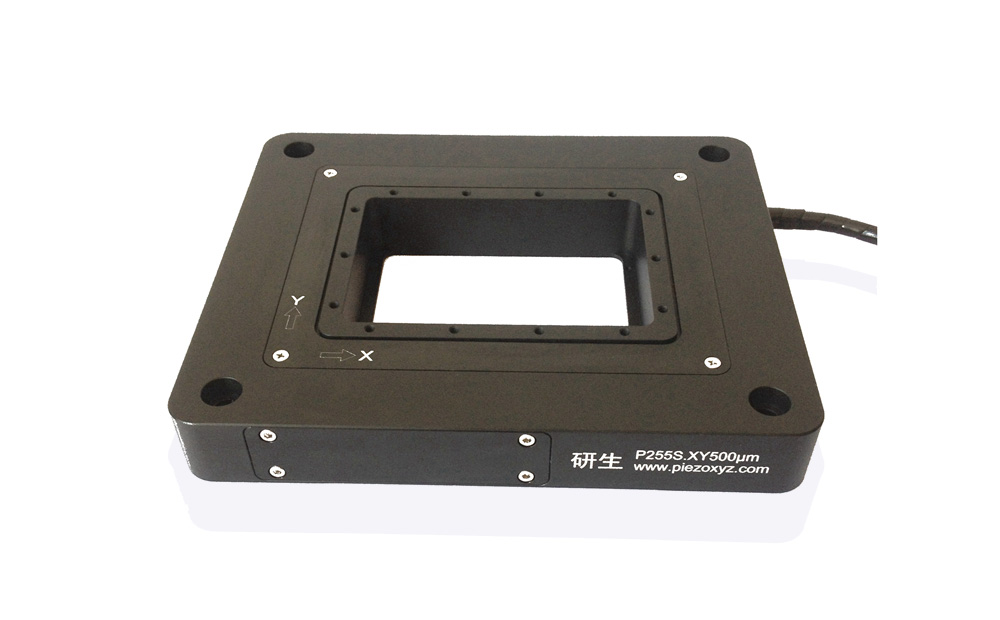
二维压电平移台【XY】

-
二维压电位移台【XZ】

-
二维压电偏摆台【θxθy】

-
三维压电位移台【XYZ】

-
三维压电偏摆台【Zθxθy】

-
三维压电纳米台【XYθz】

-
六维压电位移台【XYZθxθyθz】

-
压电陶瓷元件

-
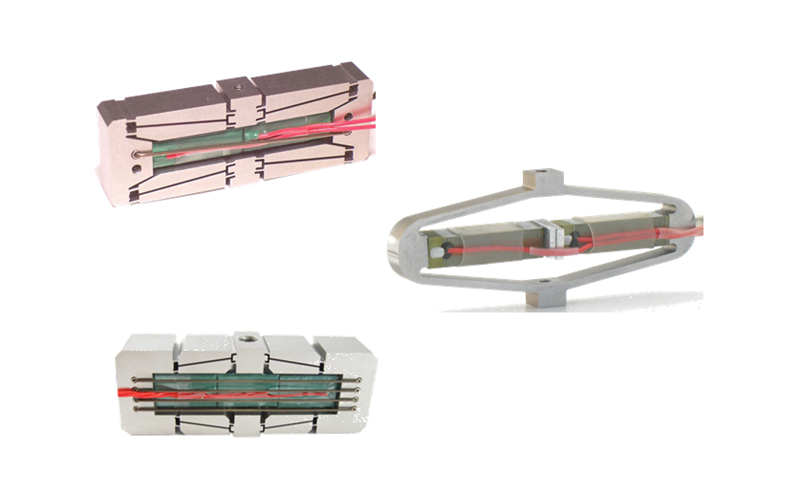
压电陶瓷促动器

-
压电快速偏摆镜

-
压电物镜定位器

-
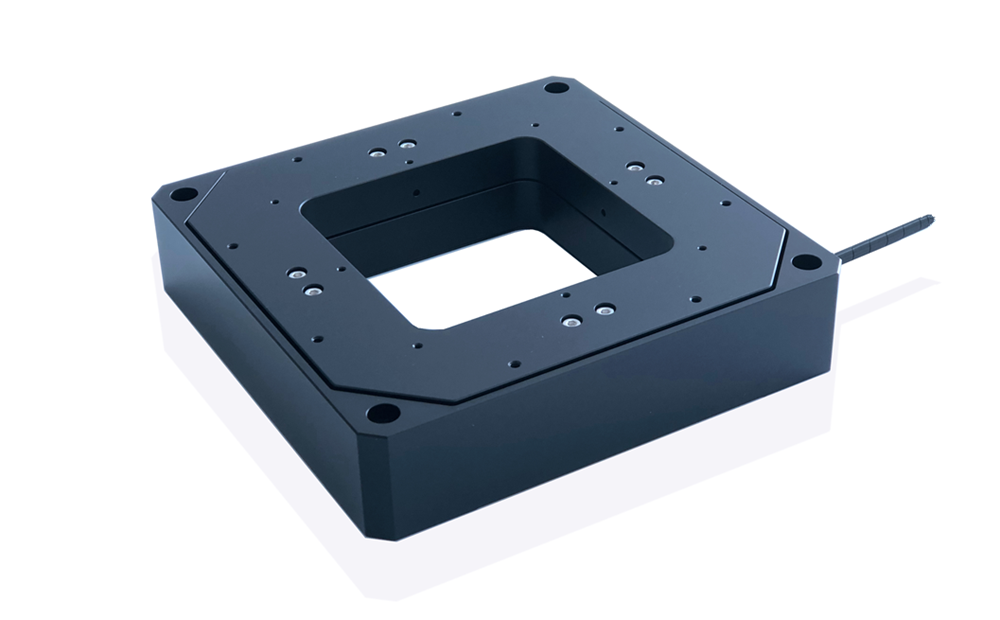
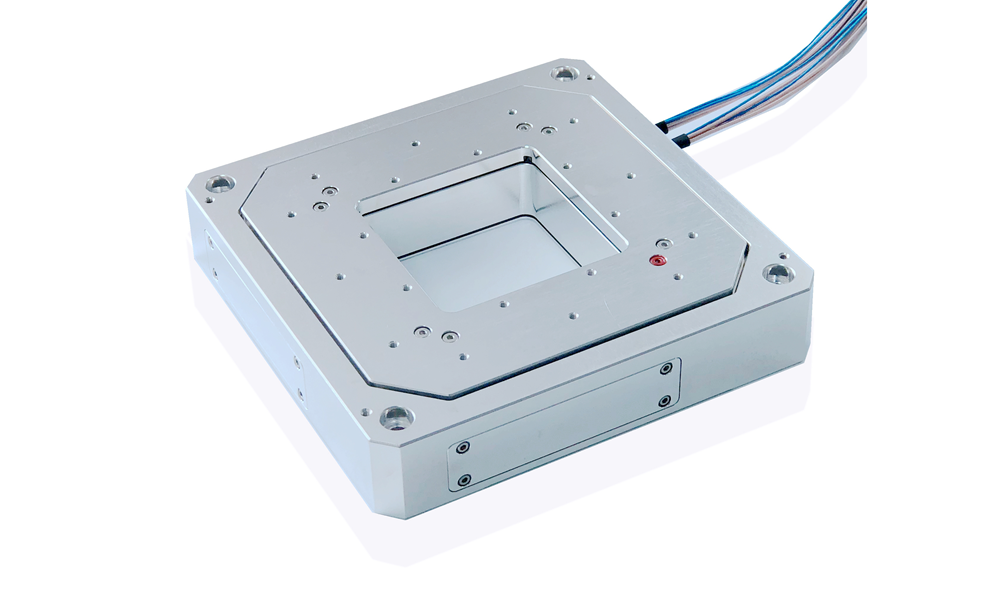
压电显微扫描台

-
模块化压电控制器

-
集成式压电控制器

-
一维压电平移台【X】
-
-
显微与成像领域

-
测量/激光技术/光学检测/摩擦学领域

-
生物科技与生命科学领域

-
新药设计与医疗技术领域

-
超精密加工(金属、光学、激光切割…)领域

-
半导体技术领域

-
纳米技术、纳米制造与纳米自动化领域

-
数据存储技术领域

-
光电子、通信与集成光学领域

-
天文与自适应光学领域

-
航天/图像处理/低温与真空环境领域

-
显微与成像领域
-
-
技术专栏

-
使用指南

-
技术术语

-
定制服务

-
下载中心

-
技术专栏
-
-
企业公告

-
行业动态

-
视频中心

-
企业公告
-
-
企业介绍

-
人力资源

-
企业文化

-
企业介绍
-
-
联系方式

-
售后服务

-
在线留言

-
联系方式
主动轴
ꄳ
ꄳ
ꄷ
传感器
ꄳ
ꄳ
ꄷ
运动行程
ꄳ
ꄳ
ꄷ
分辨率
ꄳ
ꄳ
ꄷ
线性化
ꄳ
ꄳ
ꄷ
重复精度
ꄳ
ꄳ
ꄷ
刚度
ꄳ
ꄳ
ꄷ
谐振频率
ꄳ
ꄳ
ꄷ
推/拉力
ꄳ
ꄳ
ꄷ
负载能力
ꄳ
ꄳ
ꄷ
开/闭环
ꄳ
ꄳ
ꄷ
空回
ꄳ
ꄳ
ꄷ
带宽
ꄳ
ꄳ
ꄷ
蠕变
ꄳ
ꄳ
ꄷ
串扰
ꄳ
ꄳ
ꄷ
滞后
ꄳ
ꄳ
ꄷ
电容
ꄳ
ꄳ
ꄷ
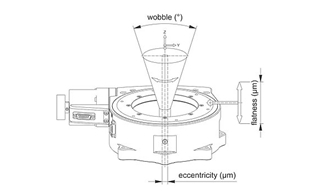
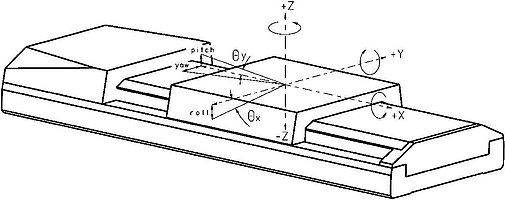
偏心度
ꄳ
ꄳ
ꄷ
柔性铰链导向
ꄳ
ꄳ
ꄷ
输入电压范围
ꄳ
ꄳ
ꄷ
最大侧向力
ꄳ
ꄳ
ꄷ
上升时间
ꄳ
ꄳ
ꄷ
纹波、噪声
ꄳ
ꄳ
ꄷ
串联运动
ꄳ
ꄳ
ꄷ
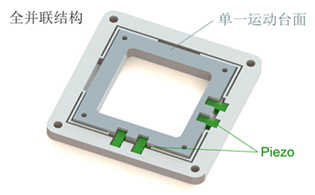
并联运动
ꄳ
ꄳ
ꄷ
PZT压电陶瓷
ꄳ
ꄳ
ꄷ
压电驱动器
ꄳ
ꄳ
ꄷ
工作限制、保护
ꄳ
ꄳ
ꄷ




