






















-
-
一维压电平移台【X】

-
一维压电升降台【Z】

-
一维压电旋转台【θz】

-
二维压电平移台【XY】

-
二维压电位移台【XZ】

-
二维压电偏摆台【θxθy】

-
三维压电位移台【XYZ】

-
三维压电偏摆台【Zθxθy】

-
三维压电纳米台【XYθz】

-
六维压电位移台【XYZθxθyθz】

-
压电陶瓷元件

-
压电陶瓷促动器

-
压电快速偏摆镜

-
压电物镜定位器

-
压电显微扫描台

-
模块化压电控制器

-
集成式压电控制器

-
一维压电平移台【X】
-
-
显微与成像领域

-
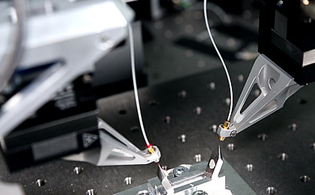
测量/激光技术/光学检测/摩擦学领域

-
生物科技与生命科学领域

-
新药设计与医疗技术领域

-
超精密加工(金属、光学、激光切割…)领域

-
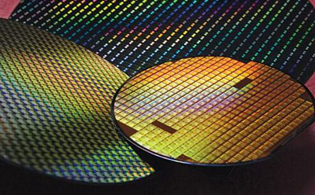
半导体技术领域

-
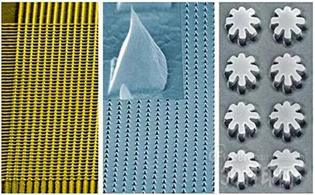
纳米技术、纳米制造与纳米自动化领域

-
数据存储技术领域

-
光电子、通信与集成光学领域

-
天文与自适应光学领域

-
航天/图像处理/低温与真空环境领域

-
显微与成像领域
-
-
技术专栏

-
使用指南

-
技术术语

-
定制服务

-
下载中心

-
技术专栏
-
-
企业公告

-
行业动态

-
视频中心

-
企业公告
-
-
企业介绍

-
人力资源

-
企业文化

-
企业介绍
-
-
联系方式

-
售后服务

-
在线留言

-
联系方式




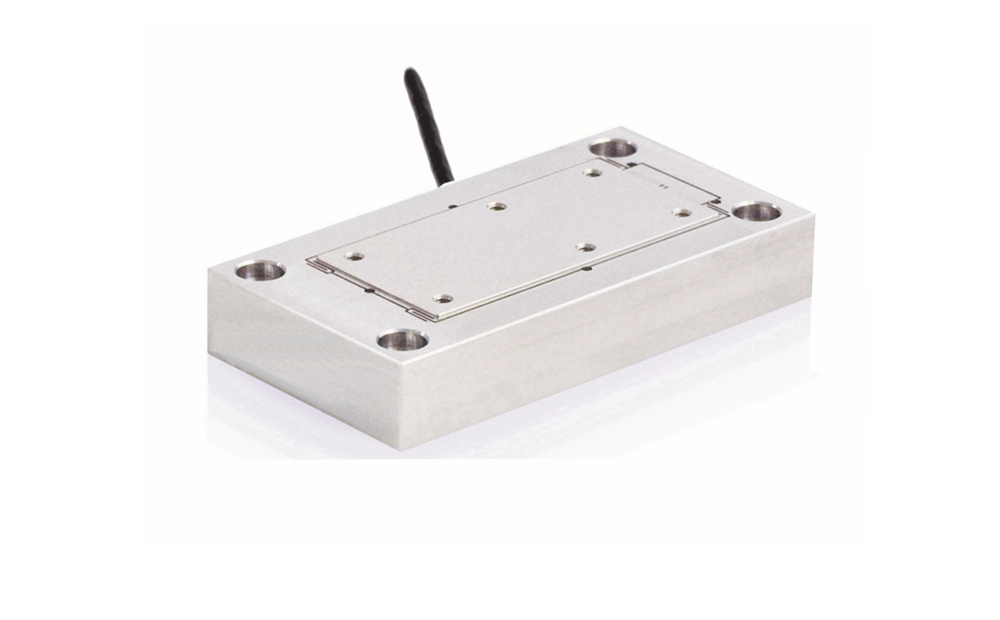
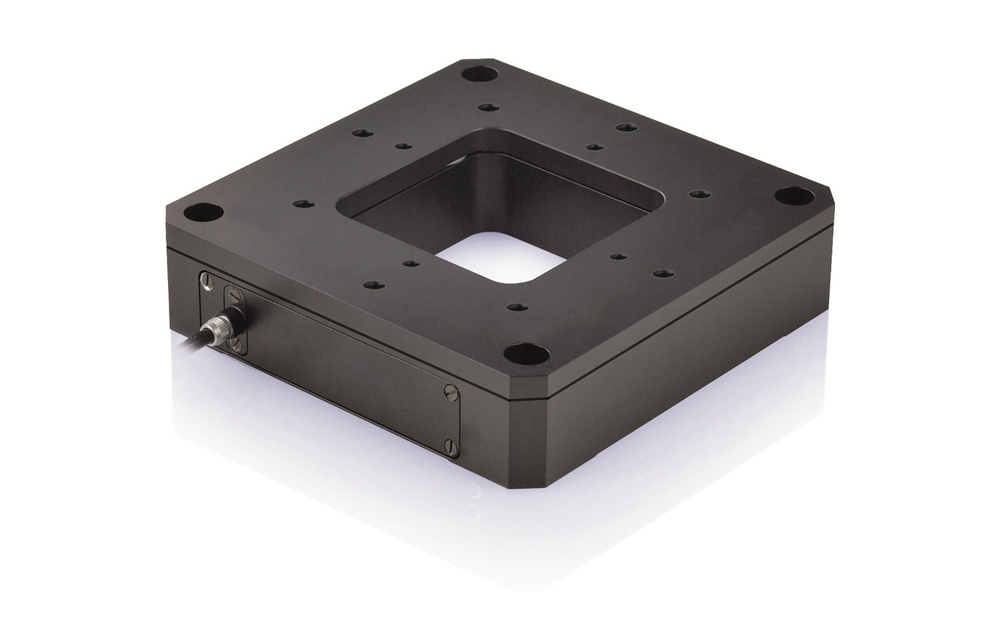
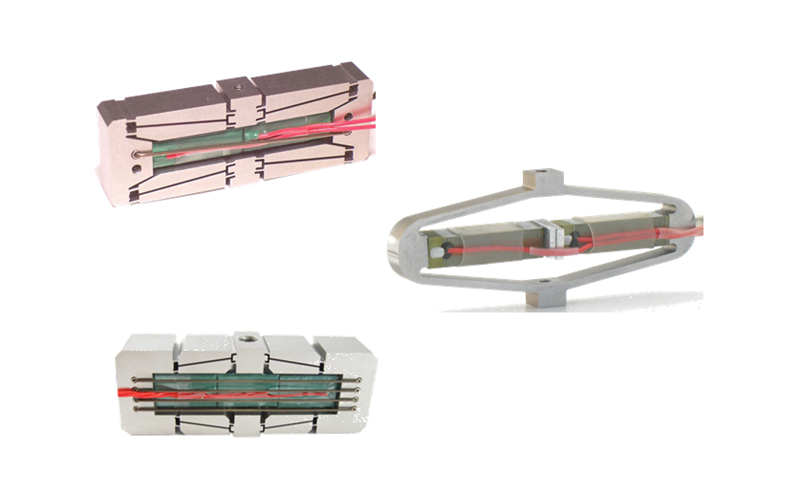
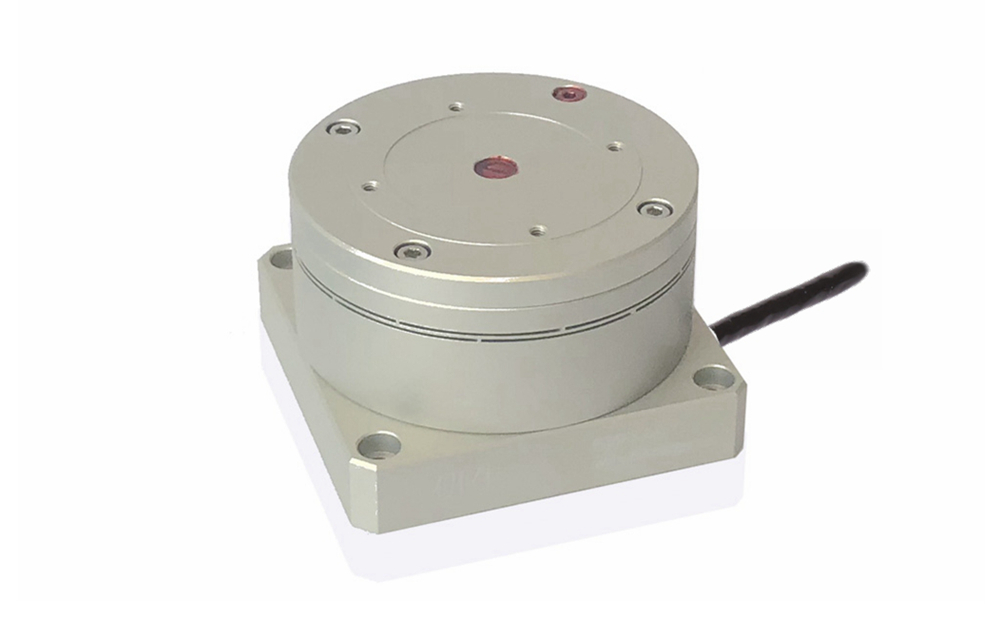
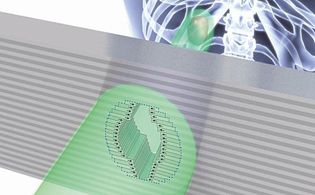
压电陶瓷Z向/偏摆台 ║P321S采用压电陶瓷驱动的Z向和Tip/Tilt精密光束压电陶瓷纳米级偏转镜,用于反射镜和光学元件的高动态三脚系统,压电Z/偏摆台内部使用无回差柔性铰链并联导向结构,采用有限元仿真分析优化柔性铰链结构,三脚支架结构柔性导向系统具有超高的导向精度,且具有高刚性、高负载、无磨损、免维护等特点,压电偏摆台内置精密位移传感器进行全闭环的位置反馈,确保了压电偏摆台具有极佳的运动控制精度,定位精度、分辨率和稳定性可以达到纳米量级,定位稳定时间仅为毫秒量级。紧凑型设计,可更好的集成于光学系统中。可根据用户需求定制固定及出线方式。
内置高性能压电陶瓷促动器具有超长使用寿命
压电陶瓷促动器由环氧脂质涂层包裹,具有优异的防潮特性,避免漏电流增大造成故障,可实现无故障运行1000亿个循环。
零间隙无摩擦柔性铰链导向带来高导向精度
柔性铰链导向无需维护、无摩擦、无磨损,无需润滑。它们的刚性可实现高负载能力,且它们对冲击和振动不敏感。
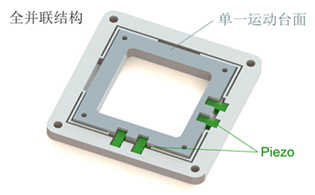
并联运动实现高动态多轴操作
在并联多轴运动定位系统中,所有促动器作用于同一个运动平台。所有轴具有最小的质量惯性和相同的动态性设计,可实现快速、高动态和高精密的运动。

| ◆ 紧凑的3脚并联运动实现更高精度和动态;
◆ 无摩擦柔性铰链导向可实现极高的运动精度; ◆ 高性能压电陶瓷促动器带来超长使用寿命; ◆ 内置精密位移传感器进行全闭环位置反馈,开/闭环可供选择。 |
● 图像处理/稳定 ● 光学捕获 ● 激光扫描/光束偏转 ● 激光调谐 ● 光学过滤器/开关 ● 光学 ● 激光束稳定 |

多轴偏摆系统运动学
研生公司的压电偏摆系统基于所有运动轴在单一移动平台并联运动。该系统可实现比两个单轴串联系统具有更高的线性度,且这种并联结构外形尺寸更加紧凑。压电偏摆镜和压电偏摆平台适用于高动态操作,例如追踪、扫描、图像稳定、消除漂移和振动;同时也适用于光学系统和标本的静态定位。研生的压电偏摆系列产品可使光束偏转至90mrad(甚至更大偏转角)、几微秒的极短响应时间和可达纳弧度范围的分辨率。研生提供多种大范围偏转角的紧凑型激光束偏转控制系统。
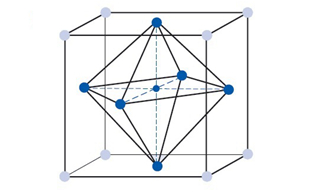
三脚压电陶瓷驱动的偏摆系统(三脚支架)
平台由三个彼此呈120°角的压电陶瓷致动器控制。通过坐标变换,三支致动器配合调节实现偏运动。除了偏摆运动,平台也可以线性用于Z轴运动。例如,用于校正光路长度(移相器)。 下面的公式用于计算偏摆角度和在Z轴的升降范围。A、B和C是相应致动器的线性位移:

三脚压电陶瓷驱动致动器设置
压电偏摆镜动力学
压电偏摆系统的最大工作频率取决于它的机械谐振频率。
为了估计系统的有效谐振频率,需计算出反射镜的转动惯量。
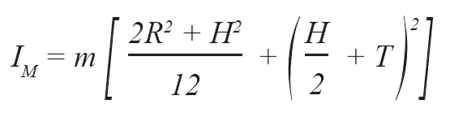
圆形反射镜的转动惯量计算公式如下:
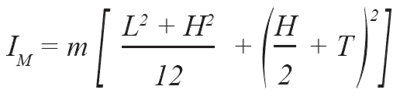
矩形反射镜的转动惯量计算公式如下:
|
m 反射镜重量 [g] |
|
IM 反射镜的转动惯量 [g × mm²] |
|
L 偏转轴正交的反射镜长度 [mm] |
|
H 反射镜厚度 [mm] |
|
T 支点到反射镜表面的距离 (参见各型号 >> 产品技术参数) [mm] |
|
R 反射镜半径 [mm] |
带载反射镜的偏摆系统的谐振频率
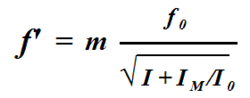
根据已知的空载偏摆系统的谐振频率及转动惯量(参见 >> 产品技术参数)和计算得出的反射镜转动惯量,可通过如下公式计算得出整个偏摆系统的谐振频率。
带载反射镜的偏摆系统的谐振频率计算公式如下:
|
f' 带载反射镜的偏摆系统的振谐频率 [Hz] |
|
f0 空载偏摆系统的振谐频率 [Hz] |
|
I0 空载偏摆系统的转动惯量 (参见 >> 产品技术参数) [g × mm²] |
|
IM 反射镜转动惯量 [g × mm²] |
|
m 反射镜重量 [g] |
|
型号 |
P321S |
P322S |
P324S |
单位 |
公差 |
|
主动轴 |
Z,θx,θy |
Z,θx,θy |
Z,θx,θy |
- |
- |
|
运动和定位 |
|
|
|
|
|
|
传感器类型 |
SGS |
SGS |
SGS |
- |
- |
|
开环直线行程[-20V~+150V] |
19 |
38 |
76 |
μm |
±20% |
|
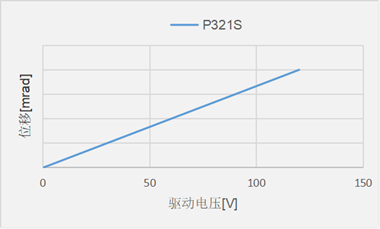
闭环直线行程[0V~+120V] |
15 |
30 |
60 |
μm |
±20% |
|
开环偏转行程[-20V~+150V] |
3.5x3.5 |
6.8x6.8 |
13.5x13.5 |
mrad |
±20% |
|
闭环偏转行程[0V~+120V] |
2.5x2.5 |
5x5 |
10x10 |
mrad |
±20% |
|
开环分辨率@Z |
0.2 |
0.5 |
1 |
nm |
typ. |
|
闭环分辨率@Z |
0.3 |
0.6 |
1.2 |
nm |
typ. |
|
开环分辨率@θX,θY |
0.02 |
0.1 |
0.2 |
µrad |
typ. |
|
闭环分辨率@θX,θY |
0.05 |
0.25 |
0.5 |
µrad |
typ. |
|
闭环线性度 |
0.1 |
0.15 |
0.2 |
%F.S. |
typ. |
|
重复定位精度@Z |
8 |
15 |
30 |
nm |
typ. |
|
重复定位精度@θX,θY |
0.8 |
1.5 |
3 |
µrad |
typ. |
|
机械特性 |
|
|
|
|
|
|
空载谐振频率@Z |
2.4 |
2 |
1 |
KHz |
±20% |
|
谐振频率@Z [加载Ф25x8mm玻璃镜片] |
1.1 |
1 |
0.7 |
KHz |
±20% |
|
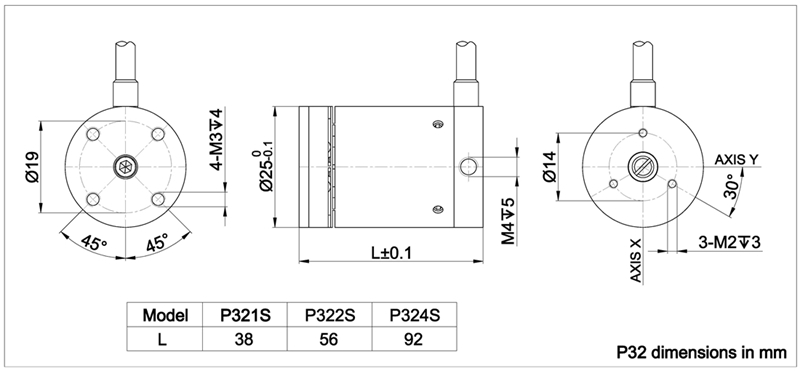
支点到台面的距离 |
7 |
7 |
7 |
mm |
±0.5mm |
|
平台转动惯量 |
1530 |
1530 |
1530 |
g•mm² |
±20% |
|
其他 |
|
|
|
|
|
|
工作温度 |
-20~80 |
-20~80 |
-20~80 |
℃ |
- |
|
材质 |
钢 |
钢 |
钢 |
- |
- |
|
外形尺寸 |
Ф25x38 |
Ф25x56 |
Ф25x92 |
mm |
- |
|
重量 |
0.2 |
0.38 |
0.7 |
Kg |
±5% |
|
线缆长度 |
1.5 |
1.5 |
1.5 |
m |
±10mm |
|
连接器类型 |
LEMO |
LEMO |
LEMO |
- |
- |
|
注:最大驱动电压为-20V...+150V;对于高可靠的长期使用,建议驱动电压为0V...+120V。 |
|||||
❶ 基于无摩擦高精度柔性铰链运动导向的压电陶瓷纳米定位系统,系统分辨率仅受放大器噪声和测量技术的限制。开环分辨率为受系统放大器噪声限制所能达到的典型值。极低的系统定位噪声可获得满行程十万分之一以上的闭环分辨率。
❷ 各运动轴的行程范围相互制约,此表中的数据为单轴可实现的最大行程。