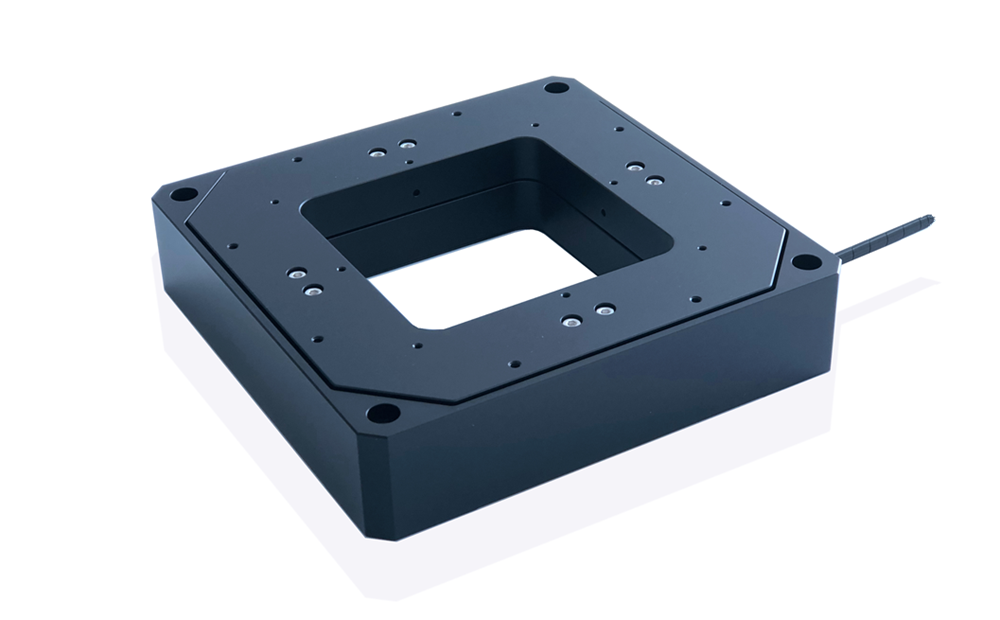
压电偏摆台 ║P520TS是采用压电陶瓷驱动的纳米级精密定位压电位移台,压电偏摆台内部使用无回差柔性铰链并联导向结构,采用有限元仿真分析优化柔性铰链结构,差分并联结构柔性导向系统具有超高的导向精度,且具有高刚性、高负载、无磨损、免维护等特点,压电位移台内置精密位移传感器进行全闭环的位置反馈,确保了压电偏摆台具有极佳的运动控制精度,定位精度、分辨率和稳定性可以达到纳米量级,定位稳定时间仅为毫秒量级。中空式超薄设计,且中央通孔较大,可更好的集成于显微及扫描系统中。
典型应用:快速反射镜系统(FSM)作为发射光源与接收端之间控制光束传播方向的精密光学仪器,集光、机、电技术于一身,内置的精密压电偏摆台作为核心部件发挥着重要的作用,凭借其高精度、高分辨率、快速响应等优点,已被广泛应用于天文望远镜、激光通讯、自适应光学、复合轴精密跟踪等领域。
内置高性能压电陶瓷促动器具有超长使用寿命
压电陶瓷促动器由环氧脂质涂层包裹,具有优异的防潮特性,避免漏电流增大造成故障,可实现无故障运行1000亿个循环。
零间隙无摩擦柔性铰链导向带来高导向精度
柔性铰链导向无需维护、无摩擦、无磨损,无需润滑。它们的刚性可实现高负载能力,且它们对冲击和振动不敏感。
并联运动实现高动态多轴操作
在并联多轴运动定位系统中,所有促动器作用于同一个运动平台。所有轴具有最小的质量惯性和相同的动态性设计,可实现快速、高动态和高精密的运动。

|
◆ 结构紧凑,低外形,易于集成; ◆ 并联运动设计可实现更高精度和动态性; ◆ 无摩擦柔性铰链并联导向可实现极高的运动精度; ◆ 高性能压电陶瓷促动器带来超长使用寿命; ◆ 内置精密位移传感器进行全闭环位置反馈,开/闭环可供选择。 |
● 计量 ● 干涉测量 ● 光子学/集成光学 ● 平版印刷术 ● 纳米定位 ● 扫描显微镜 ● 样本对准 ● 微加工 |

多轴偏摆系统运动学
研生公司的压电偏摆系统基于所有运动轴在单一移动平台并联运动。该系统可实现比两个单轴串联系统具有更高的线性度,且这种并联结构外形尺寸更加紧凑。压电偏摆镜和压电偏摆平台适用于高动态操作,例如追踪、扫描、图像稳定、消除漂移和振动;同时也适用于光学系统和标本的静态定位。研生的压电偏摆系列产品可使光束偏转至90mrad(甚至更大偏转角)、几微秒的极短响应时间和可达纳弧度范围的分辨率。研生提供多种大范围偏转角的紧凑型激光束偏转控制系统。
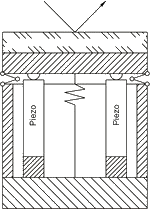
差动压电陶瓷驱动的偏摆系统(四脚支架)
|
具有差动压电驱动的倾斜系统的原理 |
平台由一对彼此呈90°角的压电陶瓷致动器控制。四个致动器根据偏摆方向两两单独控制。 由于偏摆轴θX和θY成正交设置,因此无需坐标系变换。这种差分式结构的设计优点为在较大温度变化范围内保持完美的位置/角度稳定性。每个运动轴配置两个传感器,确保偏摆位置的稳定性,并提供了更好的线性度和分辨率。 |
压电偏摆镜动力学
压电偏摆系统的最大工作频率取决于它的机械谐振频率。
为了估计系统的有效谐振频率,需计算出反射镜的转动惯量。
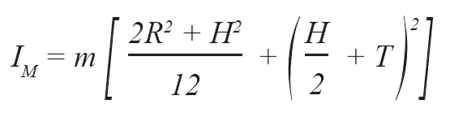
圆形反射镜的转动惯量计算公式如下:
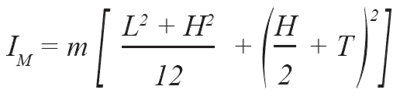
矩形反射镜的转动惯量计算公式如下:
|
m 反射镜重量 [g] |
|
IM 反射镜的转动惯量 [g × mm²] |
|
L 偏转轴正交的反射镜长度 [mm] |
|
H 反射镜厚度 [mm] |
|
T 支点到反射镜表面的距离 (参见各型号 >> 产品技术参数) [mm] |
|
R 反射镜半径 [mm] |
带载反射镜的偏摆系统的谐振频率
根据已知的空载偏摆系统的谐振频率及转动惯量(参见 >> 产品技术参数)和计算得出的反射镜转动惯量,可通过如下公式计算得出整个偏摆系统的谐振频率。
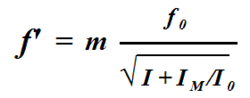
带载反射镜的偏摆系统的谐振频率计算公式如下:
|
f' 带载反射镜的偏摆系统的振谐频率 [Hz] |
|
f0 空载偏摆系统的振谐频率 [Hz] |
|
I0 空载偏摆系统的转动惯量 (参见 >> 产品技术参数) [g × mm²] |
|
IM 反射镜转动惯量 [g × mm²] |
|
m 反射镜重量 [g] |
|
型号 |
P520TS |
单位 |
公差 |
|
主动轴 |
θx,θy |
- |
- |
|
运动和定位 |
|
|
|
|
传感器类型 |
SGS |
- |
- |
|
开环行程[-20V~+150V] |
2x2 |
mrad |
±20% |
|
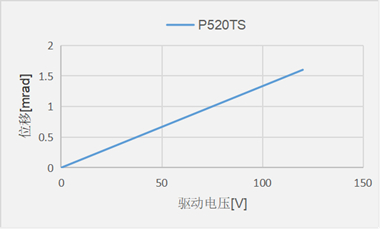
闭环行程[0V~+120V] |
1.6x1.6 |
mrad |
±20% |
|
开环分辨率 |
0.05 |
µrad |
typ. |
|
闭环分辨率 |
0.2 |
µrad |
typ. |
|
闭环线性度 |
0.15 |
%F.S. |
typ. |
|
重复定位精度 |
±0.2 |
µrad |
typ. |
|
机械特性 |
|
|
|
|
运动方向刚度 |
0.6/0.6 |
N/μm |
±20% |
|
空载谐振频率 |
450/450 |
Hz |
±20% |
|
运动方向推/拉力 |
50/25 |
N |
Max. |
|
承载能力 |
20 |
N |
Max. |
|
其他 |
|
|
|
|
工作温度 |
-20~80 |
℃ |
- |
|
材质 |
铝,钢 |
- |
- |
|
外形尺寸 |
130x130x18 |
mm |
- |
|
通光孔径 |
80x80 |
mm |
- |
|
重量 |
0.55 |
Kg |
±5% |
|
线缆长度 |
1.5 |
m |
±10mm |
|
连接器类型 |
LEMO│D-Sub9 |
- |
- |
|
注:最大驱动电压为-20V...+150V;对于高可靠的长期使用,建议驱动电压为0V...+120V。 |
|||
❶ 基于无摩擦高精度柔性铰链运动导向的压电陶瓷纳米定位系统,系统分辨率仅受放大器噪声和测量技术的限制。开环分辨率为受系统放大器噪声限制所能达到的典型值。极低的系统定位噪声可获得满行程十万分之一以上的闭环分辨率。